سیستمهای راداری دارای انواع متنوع و متعددی هستند که یکی از آنها رادارهای Mimo اسـت. اخیراً این دسته از رادارها مورد توجه محققان قرار گرفته و فعالیتهـای علمـی گسـترده ای در ایـن زمینـه انجام شده است. پس از پیدایش و استفاده از سیستمهای مخابراتی Mimo و اثبات تواناییها و قابلیتهای این سیستمها، این مفهوم وارد متون راداری نیز شد.
این رادارها در حال حاضـر سـهم بزرگـی از تحقیقـات علمی را به خود اختصاص دادهاند. مسیله روز جهان هستند و اکثر کارهای علمی در این زمینه بـه خصـوص در زمینه مکانیابی گیرندهها و فرستندهها از سال ۲۰۰۸ میلادی بـه بعـد صـورت گرفتـه اسـت. ایـدهی اصلی رادارهای Mimo در آن است که از پیشرفتهای شگرف سیستمهای مخابراتی Mimo، در کاربردهای راداری بهره گیرند.
اجزای رادارها
این رادارها از چنـدین آنـتن فرسـتنده و چنـدین آنـتن گیرنـده برخوردارنـد و بـرخلاف رادارهای آرایه فازی، در این رادارها هرکدام از فرستندهها قادر به ارسال شکل موج متفـاوتی مـیباشـند. از آنجایی که این رادارها درجه آزادی بسیار بیشتری نسبت به رادارای عادی فراهم میکند، طراحی شکل موج در این رادارها از اهمیت بیشتری برخودار خواهد بود. این دسته از رادارهـا دارای دو نـوع رادارهـای بـا آنـتنهای هم مکان و آنتنهای گسترده هستند.
یکـی از موضـوعات مطـرح در رادارهـای Mimo بـا آنـتنهـای گسترده، نحوه چیدمان آنتنهای این رادارها در یک منطقه جغرافیای است. عملکرد این رادارها وابسـته بـه نحوه قرارگیری آنها بوده که یکی از علتهای آن وابستگی عملکـرد ایـن رادارهـا بـه فاصـله و زاویـه نسـبی فرستنده و هدف و گیرنده است.
تحقیقات در زمینهی رادار بسیار قدیمیتر از آن است که بتوان آن را شاخهای جدید از تحقیقات علمی نامید. در سال ۱۹۰۴ یک محقق آلمانی بنام کریستین هولم یک دستگاه جدید که با استفاده از جرقه و شکاف (مانند شمع اتومبیل) چون یک فرستنده و گیرنده کار میکرد ساخت. استفاده از این دستگاه در تشخیص کشتیها در مه غلیظ بود. این دستگاه تقریباً اولین رادار بود که البته هیچ پارامتری از هدف بجز وجود آن را تشخیص نمیداد.
سپس در سال ۱۹۳۵ یک محقق بریتانیایی به نام رابرت واتسن راداری به شکل تقریباً امروزی برای تشخیص هدف و اندازهگیری پارامتر سرعت در آن ساخت. در طول جنگ جهانی دوم به علت نیاز شدید به رادار، تحقیقات گستردهای در این شاخه صورت گرفت و تکنولوژی مورد استفاده توسط واتسن به سرعت به رشد خود ادامه داد. ارتش بریتانیا برای مقابله با حملات هوایی از رادار استفاده کرد.
پیشرفتهای زمان جنگ
در حقیقت بسیاری از مفاهیم رادار کنونی مرهون پیشرفتهای رادار در زمان جنگ هستند. در سال ۱۹۳۰ با ظهور رادارهای SAR تحقیقات رادار جان تازه ای گرفت که این شاخهی جدید باعث سیل تحقیقات در این زمینه از رادار شد. بعد از جنگ جهانی دوم تکنولوژی رادار باز هم به پیشرفت خود ادامه داد اما نه به سرعت زمان جنگ تا این که در سال ۱۹۶۰ مفاهیم آرایه فازی از آنتنها به سمت رادارکشیده شد و درصد بسیاری از تحقیقات رادار مجذوب آرایه های فازی برای بهبود عملکرد رادار شد. استفاده از آرایه فازی دقت رادار را بسیار بالا برد و باعث شد رادار در زمینه ی عملی نیز پیشرفت زیادی بکند.
پردازش دیجیتال سیگنالها
در دهه ۱۹۷۰ پردازش دیجیتال سیگنالها (DSP) رشد سریعی یافت. تیوری DSP در رادار نیز نفوذ کرد و همچنان در حال استفاده میباشد. رشد سریع کامپیوترها و ریزپردازندهها باعث شد تا استفاده از شکل موجهای بیشتر و متنوعتر در رادار مانع عملی نداشته باشد. در دهه ۱۹۹۰ رادارهای با شکل موج های متعامد مورد استفاده قرار گرفت.
در سالهای بعد از ۲۰۰۰ ،تکنولوژی رادار دوباره بعد دیگری یافت و آن رادارهای Mimo بود. در ایـن رادارها چند آنتن فرستنده میتوانند شکل موج های کـاملاً متنـوعی را ارسـال کنند. کـه ایـن نکتـه بـرخلاف رادارهای آرایه فازی بود که شکل موجهای ارسالی بطور خطی به هم وابسته بودند و در واقـع هـر کـدام گونـه شیفت یافته و تقریب شدهی از یک سیگنال اصلی کوپل شده بودند. در اینجا درجهی آزادی بسیار بالاتر بوده و شکل موجها میتوانند کاملاً همبسته و یا عمود برهم انتخاب شوند.
بطور کلی یک رادار از ارسال امواج الکترومغناطیسی و دریافت بازگشت هـای آنهـا از اجسـام مختلـف برای شناسایی یا آشکارسازی آن ها استفاده می کند. رادارها چه در سطح نظامی و چه در سـطح غیـر نظـامی دارای کاربردهای بسیار گستردهای هستند. رادارها سیستمهـای پیچیـدهای هسـتند کـه کاربردهـای بسـیار متنوعی دارند. نحوهی کلی و عمومی عملکرد رادارها به این صورت است که یک سیگنال را از طریق یـک فرسـتنده ارسال کرده و نسخه شیفت یافته و فرکانسی سیگنال ارسـالی را دریافـت مـیکننـد.
تقسیمبندی رادار ها
رادارها از نظر سیگنال ارسالی به دو دسته کلی پالسی و موج پیوسته تقسیم مـیشـوند. در رادارهـای پالسی یک پالس از طرف فرستنده به سمت هدف مورد نظر ارسال شده و در گیرنـده پـژواک آن دریافـت مـیشود. این پالس با پریود PRT مجدداً ارسال میشود (البته پالس مورد نظر پوش سیگنال ارسالی است و خـود سیگنال یک موج سینوسی است). این در حالی است که در رادارهـای مـوج پیوسـته یـک سـیگنال سینوسـی پیوسته در زمان ارسال میشود. در واقع در این نوع رادارها فرستنده همواره روشن اسـت و دارای کاربردهـای محدودی نیز هستند. در شکل ۱ و شکل ۲ شمای کلی یک رادار پالسی وموج پیوسته را مشـاهده مـیکنید.
شکل ۱ نمایش نحوه برخورد امواج با هدف و خروجی پردازشگر راداری (و محاسبه فاصله از تأخیر و سرعت از روی داپلر)شکل ۲ شمای کلی یک رادار موج پیوسته و محاسبه سرعت هدف از روی داپلر
چون پهنای پرتو آنتنها غالباً باریک است این رادارها برای پوشش منطقـه بایـد ۳۶۰ درجـه گـردشکنند. رادارها بایستی با نویز، کلاتر و تداخل مقابله کنند تا بتوانند اهداف را تشخیص دهنـد. در شـکل ۳ اثر نویز را در نمایشگر یک رادار مشاهده میکنید.
مروری بر مفاهیم پایه رادار
فاصله
رادارهای چند ورودی - چند خروجی (رادار MIMO) 21
پیدا کردن فاصله در رادارها بعنوان مهمترین پارامتر در اکثر کاربردهـا مطـرح اسـت. ایـن فاصـله بـه فاصلهی شعاعی هدف تا رادار گفته میشود که با R نمایش داده میشود. با توجه بـه آن کـه سـرعت امـواج همان سرعت نور است و موج ارسالی توسط رادار یک مسیر رفـت و برگشـت را طـی مـیکنـد، رابطـه فاصـله بصورت زیر است:
که Δt مدت زمان رفت و برگشت موج است.
رزولشن فاصله
این پارامتر از مهمترین معیارها در مقایسه رادارهای مختلف با یکدیگر است. فرض کنید که یک رادار برای تشخیص دو هدف مجزا از هم، نیاز به حداقل فاصلهی ΔR بین این هدف داشته باشد. همچنـین فـرض کنید حداکثر فاصله را با Rmax و حداقل فاصلهی تشخیص را با Rmin نشان دهیم، بدین ترتیـب ΔR را رزولشـن فاصله و M را تعداد bin های پوشش رادار مینامند.
فرکانس داپلر
رادارهای چند ورودی - چند خروجی (رادار MIMO) 22
بعد از فاصله، مهمترین پارامتر دیگر هدف، سرعت است. سرعت توسط رابطه داپلر تعیـین مـیشـود. اگر هدف با سرعت v و زاویه θ نسبت به رادار حرکت کنـد، طبـق رابطـه داپلـر در فرکـانس مـوج حامـل در گیرنده یک شیفت فرکانس به میزان
حاصل خواهد شد. این شیفت را میتوان در تعیین سرعت هدف استفاده کرد.
کلاتر
علاوه برهدف، ممکن است اهداف ناخواسته و ثابـت دیگـری در اطـراف هـدف، میزانـی از تـوان مـوج ارسالی را بازگشت دهند. این میزان در برخی موارد خاص، درصد قابل توجهی از توان موج بازگشتی است. مثلاً اجسامی که در نزدیکی سطح زمین و دریا حرکت میکنند به علت بازگشت بالای مـوج از ایـن دو سـطح، بـه راحتی قابل ردگیری نیستند.
به این بازگشت ناخواستهی موج، کلاتر میگویند. تفاوت عمدهی نویز با کلاتـر، در این است که کلاتر به موج ارسالی وابسته است، یعنی اینطور نیست که با افزایش توان بتوان همچـون نـویز بر آن فایق آمد. بلکه نیاز به بکارگیری الگوریتمهای پیچیدهای در تشخیص کلاتر است.
سطح مقطع راداری
به میزان موج بازگشتی از یک هدف نسبت به موج برخورد کننده با آن را که دارای قطبیت مشـابه بـا آنتن گیرنده است سطح مقطع راداری (RCS) میگویند. بعبارت دیگر RCS میزان قابل شناسایی بـودن یـک هدف توسط رادار را بیان می کند که هرچه این مقدار بیشتر باشـد، هـدف بـرای رادار قابـل رویـتتـر اسـت.
بازگشت امـواج الکترومغناطیسی
همانطور که در بالا اشاره شد یک هدف مقدار محدودی از انرژی رادار را برمیگرداند که مقدار بازگشت امـواج الکترومغناطیسی به منبعش را عوامل گوناگونی مشخص میکنند از جمله:
مادههایی که هدف از آن ساخته شدهاست
اندازه دقیق هدف
نسبت اندازه هدف با طول موج تولید شده توسط رادار
زاویه برخورد (زاویهای که امواج راداردر هنگام برخورد با یک بخش خاص از هدف پیدا مـیکننـد کـه وابسته به شکل هدف و جهت منبع راداراست)
زاویه بازگشت (زاویهای که امواج برخورد کرده به شی آن را ترک میکنند که وابسته به زاویه برخـورد است)
قطبش امواج فرستاده شده و بازگشته با توجه به جهت هدف
شکل ۴ دیاگرام RCS یک هواپیما جنگندهرادارهای چند ورودی - چند خروجی (رادار MIMO) 23
RCS در مباحث تیوری رادار اغلب با σ نشان داده میشود.
pr توان موج بازگشتی و PD توان موج برخوردکننده با هدف است. این مفهوم ساده بسـیار کـاربردی اسـت. مثلاً در صنایع نظامی از آنجایی که مهم است اداوات جنگی پنهان از دید رادار بماننـد بسـیار مهـم اسـت کـه RCS آنها حداقل شود. در شکل ۵ یک هواپیما رادارگریز مشاهده میکنید.
شکل۵ هدف با RCS پایین
رادارهای Mimo
در این بخش ابتدا انواع رادارها را از نظر تعداد فرستنده و گیرنده بررسی میکنیم و در ادامـه مزایـا و ویژگیهای رادارهای Mimo را بررسی میکنیم و در نهایت تقسیمبندی این رادارهـا و خـواص هـر دسـته را بیان میکنیم.
Monostatic
رادارها از نظر تعداد فرستندهها و تعداد گیرندهها و همچنین مکان قرارگیری آنهـا، انـواع مختلفـی پیدا میکنند. یکی از انواع تقسیم بندی سیستمهای راداری، تقسـیمبنـدی براسـاس تعـداد فرسـتندههـا و گیرندهها است. در رادار ساده پالسی، فرستنده و گیرنده یکی هستند که به آن رادار Monostatic میگویند.
حال در صورتی که فرستنده و گیرنـده از هـم فاصـله داشـته باشـند، یـک رادار Bistatic خـواهیم داشـت. در رادارهای Monostatic، آنتنهای فرستنده نقش گیرنده را نیز ایفا میکنند ( یعنی آنـتن فرسـتنده گیرنـده و یکی است). البته این نوع رادارها از لحاظ تاریخی بعد از رادارهای Bistatic قرار میگیرند اما اغلـب از لحـاظ تیوری به علت سادهتر بودن در ابتدا بررسی میشوند. در شـکل ۶ شـمای رادار Monostatic مشـاهده مـیشود.
شکل ۶ شمای یک رادار Monostatic
رادارهـای Bistatic اولـین نـوع رادارهـا هسـتند کـه مخصوصـاً در کاربردهـای نظـامی بـه رادارهـای Monostatic ارجحیت دارند. در این نوع رادارها آنتنهای گیرنده و فرسـتنده در مکانهای متفـاوتی واقـع هستند که این خصوصیت باعث میشود در کاربردهای نظامی بتوان فرستنده را در جای امنـی تعبیـه کـرد و گیرنده فضای وسیعی را بپوشاند. در شکل ۷ شمای یک رادار Bistatic مشاهده میشود.
شکل ۷ شمای یک رادار Bistatic
Multi-static
رادارهای Multi-static را میتوان شبکهای از رادارها و کلی ترین حالت ممکن دانست که پیچیدگی نسبتاً زیادی دارد. در این رادارها چندین فرستنده و چندین گیرنـده در مکانهای مختلفـی قـرار دارنـد کـه همگی با هم کار میکنند (البته باید توجه داشت که هر یک از گیرندههـا بصـورت رادارهـای مسـتقل از هـم عمل میکنند). بنابراین دادهها از یک یا چند گیرنده جمـعآوری مـیشـوند و بـه یـک سیسـتم پردازشـگر مرکزی فرستاده میشوند. در شکل ۸ یک رادار static-Multi را مشاهده میکنید. همانطور کـه از ایـن شکل پیداست این نوع سیستم میتواند ترکیبی از رادارهای Monostatic و Bistatic باشد.
شکل ۸ شمای کلی یک رادار static-Multi
تعریف رادارهای Mimo
رادارهای Mimo به رادارهای گفته میشود که دارای تعدادی آنتن فرستنده هسـتند کـه مـیتواننـد شکل موج های یکسان و یا متفاوتی را از طریق این آنـتنهـا ارسـال نماینـد. همچنـین دارای تعـدادی آنـتن گیرنده برای دریافت این شکل موج ها از نقاط مختلف محیط هستند.
این امر باعث میشود که این رادارها در مقابل سایر رادارها از درجه آزادی بیشتری برخوردار باشند. در این رادارها هرگیرنده آشکارسازی خود را انجـام داده و تمامی داده های حاصل در یـک مرکـز، پـردازش مـیشـوند. در نهایـت در رادارهـای Mimo پـردازش سیگنال در پردازنده مرکزی انجام می گیرد که این موضوع در بخش بعد بیشتر توضیح داده خواهد شـد. در شکل ۹ شمایی از یک رادار Mimo را مشاهده میکنید.
شکل ۹ شمای از یک رادارMimo
تقسیمبندی رادار Mimo
این نوع رادارها را نیز میتوان از جنبههای گوناگونی مانند نحـوه قرارگیـری آنـتنهـا در فضـا، نـوع پردازش، نوع تلفیق دادهها و غیره تقسیمبندی کرد. در واقع Mimo جزء رادارهایstatic-Multi محسوب میشوند اما یک تفاوت عمده با این رادارها دارند.
در واقع بهتر است اینطور بیان کـرد کـه اگـر یـک شرط محدودکنندهی روی رادارهای static-Multi بگذاریم به رادار Mimo میرسیم؛ آن شرط عبـارت از آن است که پردازش محلی صورت نگیرد و پردازش صرفاً بصورت مرکزی باشد. همانطور که در بخشهـای قبلی اشاره شد تیوری Mimo بعـد از موفقیـت مخـابرات Mimo شـکل گرفـت و در واقـع محققـین دریافتند که این درجهی آزادی میتواند عملکرد رادار را بهبود ببخشد.
ویژگی رادارهای Mimo
همانطور که در بالا اشاره شد، از آنجایی که رادارهای Mimo بطور همزمان میتوانند سـیگنالهـای متفاوتی را از فرستندههای مختلف ارسال کنند، دارای درجـه آزادی بیشـتری نسـبت بـه رادارهـای معمـولی هستند. بنابراین با چند رادار معمولی باند باریک در قالب رادار Mimo و با ترکیب صحیح این سـیگنالهـا در گیرنده بصورت مجازی یک سیگنال با پهنای باند بزرگ داشت.
از مخابرات Mimo میدانیم که تعدد آنتنها باعث بوجود آمدن پدیده چندگانگی و بهـره در پهنـای باند میشود که این بهره برابر با حاصلضرب تعداد آنتنهای گیرنده و فرستنده است که خاصیت بـالا ناشـی از این مورد است. لذا پدیده چندگانگی باعث افزایش قدرت تفکیک بهتر دراین رادارها میشود.
مزایا
همچنین بـدلیل آشکارسازی هدف از چند طریق (بصورت پردازش مرکزی داده) این رادارها دقت مکانیابی بسـیار بهتـری بـه رادارهای عادی خواهند داشت. درعمل هرچقدر تعداد آنتنهای فرستنده و گیرنده بیشـتر باشـد، مزایـای این سیستم ها بیشتر به چشم خواهند بود. همانطور که در بالا اشاره شد، موضـوع دیگـر در رادار Mimo، پدیده چندگانگی است.
مشاهده هدف از چند زاویه مختلف باعث افزایش احتمال آشکارسازی می شـود کـه در ادامه بیشتر توضیح خواهیم داد. همچنین این رادارها قادر به استخراج دقیق تر پارامترهای اهـداف نسـبت بـه رادارهای عادی هستند. در مقابله با اهداف با سرعت پایین و حذف کلاتر نیز اثبات شده است کـه کـارایی ایـن رادارها بالاتر از رادارهای عادی هستند.
مزایای رادارهای Mimo
از دیگر مزایای رادارهای Mimo وجود قابلیت اطمینان بالاتر آنها به دلیل تعداد زیـاد فرسـتنده هـا و گیرندهها است. در یک سیستم راداری Mimo در صورت مختل شدن یک فرستنده و یا یـک گیرنـده (بـه هـر دلیلی) اگرچه مقداری از عملکرد سیستم کاهش پیدا می کند ولی کل سیستم همچنان پـا برجـا بـوده و مـی تواند محیط را شناسایی کند.
مثلاً اگر یکی از فرستندهها توسط موشک ضـد تشعشـع منهـدم شـود، سیسـتم همچنان میتواند به کار خود ادامه دهد که این موضوع یکی از قابلیتهای مهم عملیاتی به شمار می رود. در ادامه یکی از انواع تقسیمبندی این رادارها را بررسی می کنیم.
انواع رادارهای Mimo
همانطور که قبلا اشاره شد، رادارهای Mimo را نیز میتوان از جهات مختلف میتوان تقسـیم بنـدی کرد که یکی از این تقسیمبندیها، تقسیم بندی براساس قرارگیری آنتنها نسبت به یکـدیگر (یعنـی فاصـله آنتنها از هم) است. از این نظر رادارهای Mimo به دو نوع رادارهای با آنتنهای هم مکان و رادارهای با آنـتنهای گسترده تقسیم میشوند. این دو نوع رادار دارای مشخصات و ویژگی های منحصربفردی هسـتند کـه در ادامه به تعریف این نوع رادارها و بررسی ویژگی آن ها پرداخته میشود.
رادارهای Mimo با آنتنهای هم مکان
رادارهای آرایه فازی نسبت به رادارهای عادی، مزایای گستردهای دارند. درحال حاضر در بسـیاری از سامانه سلاح های پیشرفته در جهان از این رادارها استفاده میشود. یکی از مزایای این رادارهـا قابلیـت مـرور الکترونیکی فضا به جای مرور مکانیکی است. نوع تعمیم یافته این رادارها، رادارهای Mimo با آنـتنهـای هـم مکان است. در این چیدمان از رادارهایMimo ،آنتنها در فواصل نزدیک به هم قرار گرفته انـد (یعنـی فاصـله بین آن ها از مرتبه طول موج سیگنال حامل می باشد).
تفاوت رادار Mimo و آرایه فازی
این نوع از رادارها بسیار شبیه به رادارهای آرایـه فـازی هستند، با این تفاوت که در این رادارهـا، سـیگنالهـای ارسـالی از هـر کـدام از عناصـر آرایـه در اختیـار مـا هستند. در رادارهای آرایه فازی، سیگنال های ارسالی نسخه هایی با دامنه یکسان و شیفت یافتـه فـازی از یک سیگنال واحد هستند اما در این رادارها هیچ محدودیتی روی سیگنالهای ارسالی وجـود ندارنـد و از ایـن نظر این رادارها دارای درجه آزادی بیشتری نسبت به رادارهای آرایه فـازی هسـتند.
پـس رادارهـای Mimo بـا آنتنهای هم مکان، تمام خواص رادارهای آرایه فازی را دارا می باشند؛ بعلاوه اینکه این رادارها دارای عملکـرد بهتری می باشند که از درجه ی آزادی بالاتر آنها نسبت به رادارهـای آرایـه فـازی نتیجـه مـی شـود.
شکل۱۰ شمای کلی یک رادار آرایه فازی
درشکل ۱۰ شمای کلی یک رادار آرایه فازی دیده میشود. درجه ی آزادی ذکر شده، قابل استفاده در طراحی پرتو فرستنده میباشد. با استفاده از این درجـهی آزادی میتوان در مدیریت زمان (مرور سریع تر) و انرژی سیستم راداری نیـز بهـره جسـت. همچنـین در ایـن رادارها با استفاده از شکلدهی مکانی به پرتو و یا پردازش های زمان- مکان میتوان به دقـت هـای بسـیار بالایی در زاویه سنجی اهداف رسید.
رادارهای Mimo با آنتنهای گسترده
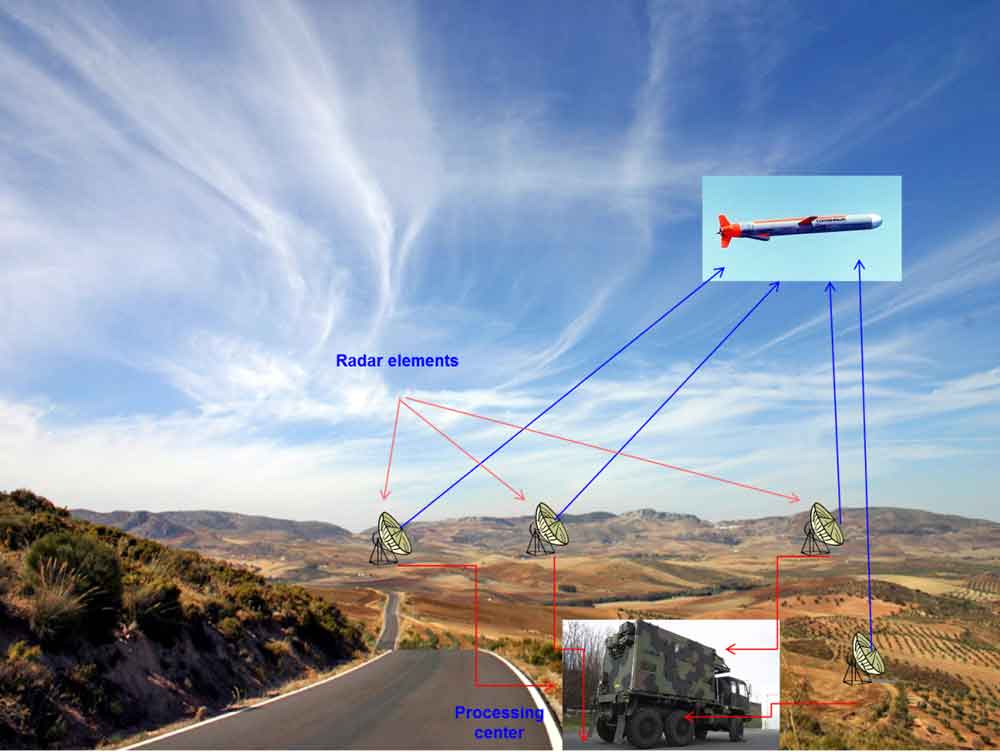
در این چیدمان از رادارهای Mimo، آنتنها در فواصل زیاد (نسبت به طول موج فرکانس حامل) قـرار گرفتهاند. بعبارتی آنتنهای فرستنده و گیرنده در یک منطقه جغرافیایی پخش شده اند. در این نوع رادار نیـز هر گیرنده باید تمامی سیگنال های ناشی از تمامی فرستنده ها را دریافت کرده و سـیگنال هـای آن هـا را بـه بخش پردازنده مرکزی ارسال کند. این توسعه در محیط دارای خواصی است که در ادامه به آن هـا اشـاره میکنیم.
اجزا
در شکل ۱۱ یک رادار Mimo با آنتنهای گسترده مشاهده میشود. همچنین این دسته از رادارهـا، حالـت تعمـیم یافتـه از رادار چنـد پایـه مـی باشـند. در رادار دو پایـه فرستنده و گیرنده از هم فاصله دارند. در رادارهای Mimo با آنتنهای گسـترده، فرسـتنده و گیرنـده در یـک مکان نبوده و از هم جدا هستند، با این تفاوت که سیگنال های ارسالی در اختیار ما میباشد و از این نظر ایـن رادارها دارای درجه آزادی هستند.
در نتیجـه رادارهـای Mimo بـا آنـتنهـای گسـترده دارای تمـام خـواص رادارهای چندپایه هستند، بعلاوه اینکه خواص ناشی از درجه آزادی سیگنال ها به آن هـا اضـافه خواهـد شـد. تفاوت دیگر این دو رادار در نوع پردازش آنهاست که رادارهای Mimo پردازش متمرکز دارند.
شکل۱۱ شکل یک سیستم راداری Mimo با آنتنهای گسترده
پردازش داده در رادارهای چند پایه
پردازش داده در رادارهای چند پایه به این صورت است که در هـر گیرنـده سـعی مـی شـود سـیگنال ناشی از فرستنده های مختلف دریافت شده و تصمیم گیری و آشکار سـازی صـورت گیـرد؛ سـپس داده هـای حاصل از تصمیم گیری به بخش پردازنده مرکزی داده ارسال میشود و ایـن مرکـز در نهایـت وجـود یـا عـدم وجود هدف و همچنین مشخصات و پارامترهای قابل تعیین آن هدف را مشخص میکنـد. ایـن در حـالی است که در رادارهای Mimo تمامی سیگنالهای دریافتی در گیرندههای مختلف ناشـی از سـیگنالهـای ارسالی فرستندههای مختلف به پردازنده مرکزی سیگنال ارسال میشود.
پردازنده مرکـزی
در نهایت پردازنده مرکـزی سـیگنال با در دست داشتن تمامی سیگنال ها میتواند تصمیم گیری نهایی را انجام دهـد کـه ایـن امـر باعـث بهبـود عملکرد این سیستمهای راداری نسبت به رادارهای چند پایه خواهد شد. البته این امر مستلزم این اسـت که یک لینک مخابراتی با پهنای باند و نرخ بالا درمنطقه جغرافیای وجود داشـته باشـد کـه بایـد هزینـههـا و مشکلاتی (مثل جمینگ و یا قطع شدن لینک) را که ممکن است به وجود بیاید، در نظر گرفت.
دیدن اهداف از زوایای مختلف
یکی دیگر از مزایای سیستمهای راداری Mimo ،دیدن اهداف از زوایای مختلف است که به نوبه خـود چندین مزیت به ارمغان می آورد. اولین مزیت این موضوع در سـطح مقطـع راداری اهـداف مـی باشـد. سـطح مقطع راداری اهداف دارای نوسانات و موجهای شدیدی نسبت به زاویه است که مقدار تمـوج سـطح مقطـعراداری نسبت به مقدار متوسط خود در تمام زوایا درحدود ۵ تا ۳۰ دسی بل میباشد. ایـن اهـداف در زوایـای مختلف، سطح مقطع های راداری متفاوتی از خود نشان می دهند که با اسـتفاده از رادارهـای Mimo بـا آنـتنهای گسترده، اهداف از زوایای مختلفی دیده میشوند.
برطـرف کـردن اثـر
مشابه پدیده محوشدگی در مخـابرات کـه دامنـه سیگنال دریافتی از بعضی مسیرها به شدت افت میکند و راه حل ارایـه شـده بـرای برطـرف کـردن اثـر ایـن پدیده، ایجاد کانال های متعدد و استفاده از چندگانگی است، در این مسیله نیز همین امر مطرح اسـت.
دامنـه سیگنال برگشتی متناسب با سطح مقطع راداری هدف می باشد و اگر توسط یک رادار تک پایه معمـولی دیـده شوند، اهداف از بعضی زوایا، سیگنال بسیار کمی را را بازتاب می کند.
استفاده از چندگانگی سطح مقطع
رادارهای Mimo با آنتنهای گسترده با قابلیت دیدن همزمـان اهـداف از زوایـای مختلـف بـا پدیـده محوشدگی مقابله کرده و باعث استفاده از چندگانگی سطح مقطع راداری اهـداف مـیشـوند و قابلیـت کشـف اهداف در هنگام آشکار سازی را بهبود میبخشند. بعبارت دیگر برای عدم کشف هدف، احتمـال اینکـه تمـامی گیرندهها که سیگنال ناشی از تمامی فرستنده ها را دریافت میکنند، نتوانند هدف را کشف کنند بسـیار کـم است.
چندگانگی در رادارهای Mimo با آنتنهای گسترده قابلیت مقابله با اهـداف رادارگریـز را نیـز بوجـود می آورد؛ زیرا اهداف رادارگریز نیز نمـیتواننـد سـطح مقطـع راداری خـود را در تمـام زوایـا کـاهش دهنـد و رادارهای Mimo با آنتنهای گسترده میتوانند از همین نقطه ضعف اهداف رادارگریز استفاده کنند.
فواید
همچنین در چنین اهدافی یکی از ویژگی های که وجود دارد این اسـت کـه ایـن اهـداف معمـولاً سـیگنال دریـافتی را درجهتی غیر از جهت دریافت شده منعکس میکنند. بنـابراین وجـود گسـتردگی بـین آنـتنهـای فرسـتنده وگیرنده راه حل این موضوع میتواند باشد. چندگانگی سطح مقطع راداری باعث افزایش سیگنال به نـویز نیـز میشود که علاوه بر افزایش قابلیت آشکار سـازی ، در تخمـین پارامترهـا نیـز بـه کمـک سیسـتم راداری مـیآید.
مزیت دیگر
مزیت دیگر دیدن اهداف از زوایای مختلف، ظهور فرکانس های داپلر مختلف از یک هـدف بـا سـرعت مشخص می باشد. همانطور که می دانیم فرکـانس داپلـر تـابعی از سـرعت شـعاعی اهـداف مـی باشـد کـه در رادارهای تک پایه این فرکانس مقدار مشخصی را به خود می گیرد. برای اهداف متحـرک در راسـتای شـعاعی نسبت به رادار این فرکانس حداکثر و برای اهداف متحرک دریک فاصله شعاعی ثابت نسبت بـه رادار (حرکـت در زاویه) این مقدار حداقل یا برابر صفر می باشند.
پردازش اهـداف متحـرک
در پردازش اهـداف متحـرک، بـرای تشـخیص اهـداف نیـاز داریم که اهداف دارای حداقلی از فرکانس داپلر باشند تا بتوانیم آن ها را از اهداف ثابـت تشـخیص دهـیم. در رادارهای Mimo با آنتنهای گسترده، اهداف از زوایای مختلف فرکانس های داپلر متفاوفی را از خود نشان میدهند که ممکن است یک هدف برای یک گیرنده، حرکت در زاویه داشته باشد اما برای یک گیرنـده دیگـر حرکت در شعاع باشد که این پدیده باعث بوجود آمدن چندگانگی در فرکانس داپلر میشود.
در نتیجه اهـداف با سرعت های پایین تر قابل تشخیص بوده و مقابله با کلاتر بهتر انجام خواهد شد. به چندگانگی ناشی از دیدن اهداف در زوایای مختلف (مجموع مزایای فوق) چندگانگی مکان گفته میشود.
درجه آزادی سیگنالهای ارسالی
علاوه بر استفاده از چندگانگی مکانی، مزیت دیگر رادارهای Mimo با آنتنهای گسترده، بحث مالتی آن است. تا اینجا مزایای فیزیکی ناشی از تعدد آنتنها بیان شد که عیناً در رادارهای چند پایه ۱۰ پلکس مکانی نیز وجود دارد اما از درجه آزادی سیگنالهای ارسالی بحثی به میان نیامده است؛ در صورتی که با استفاده از طراحی سیگنالها میتوان مزایایی را بدست آورد. در مخابرات Mimo، مالتی پلکس مکانی به معنی استفاده از آنتنهای فرستنده و گیرنده به منظور ایجاد فضایی چند بعدی برای ارسال سیگنال است. آنگاه با بکارگیری روش های مناسب امکان ایجاد کانال های موازی و مستقل از هم درسیستم بوجود می آید که بطور مستقیم منجر به افزایش ظرفیت شبکه میشود.
تفکیک مسیرهای ارسال- دریافت
در رادارهای Mimo با آنتنهای گسترده، فضای چند بعدی سیگنال از طریق ترکیب بازتابهای ناشی از اهداف و موانع مختلف بدست می آید. با طراحی مناسب شکل موج سیگنال ها میتوان مسیرهای ارسال- دریافت را به خوبی از هم تفکیک نموده و عملکرد رادار را نیز بهبود بخشید (افزایش تعداد اهداف قابل آشکارسازی یکی دیگر از مزایای رادارهای Mimo با آنتنهای گسترده، استفاده از بعد مکان بجای پهنای باند است. این ویژگی باعث افزایش مجازی پهنای باند رادار میشود که مکان یابی دقیقتر و آشکارسازی بهتر اهداف را به ارمغان می آورد). در صورت داشتن پردازش همدوس، میتوان حد تفکیک بسیار بیشتری نسبت به پردازش نا همدوس داشت.
فایده
درجه آزادی بیشتر در این رادارها باعث مدیریت در زمان و انرژی مـی شـود؛ زیـرا مـی تـوان بنـا بـه مشخصات منطقه و زمان، کارکرد هر یک از فرستند یا گیرنده را تحت اختیار گرفته و از هرکدام از آن ها بطور مناسب و در صورت نیاز استفاده کرد. افزایش دقت زاویه سنجی و دقت در تخمین پارامترها نیز یکی دیگـر از مزایای استفاده از رادارهای Mimo با آنتنهای گسترده است.
آشکارسازی در رادارهای Mimo با آنتنهای گسترده
در بالا به این موضوع اشاره شد که رادارهای Mimo با آنـتنهـای گسـترده، بـه نـوعی تعمـیم یافتـه رادارهای چند پایه می باشند. یکی از برتری های Mimo با آنتنهای گسترده بر رادارهای چند پایـه، در توانایی پردازش مشترک اطلاعات تمام گیرندهها بطور یکجا اسـت امـا در رادار Mimo بـا آنـتنهـای گسترده دو روش برای آشکارسازی اهداف وجود دارد.
روش اول
روش اول به این صورت است که اطلاعات تمام گیرندهها در محل خودشان بررسی و نتـایج حاصـل از اهداف آشکار شده به همراه سایر پارامترهایشان(مثل فاصله هدف، سرعت هدف و….) را به یـک پردازشـگر دادهمرکزی انتقال داده و درآن جا با تلفیق این اطلاعات، اهـداف موجـود گـزارش شـوند. ایـن روش ترکیـب اطلاعات از نظر ساخت و مسایل پیاده سازی، راحت تر و ملاحظـات کمتـری را نیـاز دارد زیـرا فقـط اطلاعـات استخراج شده از اهداف باید انتقال یابند؛ اما مشکلاتی از جمله بوجود آمدن اهداف کاذب بوجود می آینـد کـه به پردازش های بسیار پیچیده برای تفکیک اهداف از هم، نیاز دارند.
مثال
بطـور مثـال در نظـر بگیریـد کـه تعـدادی هدف در محیط وجود دارند. اگر احتمال هشدار کاذب را کنار گذاشته و احتمال آشکارسازی را هم یـک فـرض کنیم، تمام گیرندهها به تعداد فرستنده ها ضرب در تعداد اهداف پیک یا هدف کشف میشوند که مـیتواننـد فاصله را از خودشان بدست آورند اما در مرحله پردازش دادهها تعداد زیادی حالت وجود دارد که بین این دادهها تصمیم نهایی گرفته میشود. این کار پردازش سنگینی نیاز دارد بعلاوه این کـه احتمـال ایجـاد ابهـام هـم وجود دارد. حال اگر احتمال هشدار کاذب و احتمال عدم آشکارسازی هدف را نیز وارد کنیم، احتمال خطـا بـازهم افزایش مییابد.
روش دوم
روش دوم، بررسی سیگنال خروجی گیرندهها در یک پردازش سیگنال مرکزی است. ایـن کـار از نظـر پیاده سازی عملی و ملاحظات پیاده سازی بسیار پیچیده است اما مشکلات فوق ایجاد نشده و تمام سیگنالها در یک آشکارساز بررسی شده و آشکارسازی اهداف انجام خواهد شد. همچنین باید لینکی بین فرسـتندههـا و گیرندهها با پردازش مرکزی سیگنال برقرارکرد که بتواند با نرخ بسیار بالا سیگنال های دریافتی را انتقال دهد.
لینک بین فرستنده ها و پردازش سیگنال مرکزی به دلیل این است که شاید نیـاز بـه تغییـر سـیگنال ارسـالی باشد. این لینک به نرخ بالا به پیچیدگی و هزینه سیستم میافزاید.
رادارهای غیرفعال Mimo
رادار غیر فعال نوعی سامانه راداری است که اشیاء و اهداف را توسط پردازش بازتابی از منابع غیرفعـال در محیط، مانند امواج رسانههای بازرگانی یا علایم مخابراتی، پیدا و تعقیب میکند. در بخش های قبل با رادارهایMimo آشنا شدیم.
در این بخش حـالات خاصـی از رادارهـای Mimo را تعریف کرده و بررسی مختصری میکنیم. اگر در یک سیستم راداری Mimo توان و مکان فرستنده هـا معلـوم باشد اما در اختیار ما نباشد میتوان این سیستمها را رادار Mimo غیرفعـال نامیـد. مـثلاَ در سیسـتم راداری مایمو DVBT ،مکان و توان فرستندهها در اختیار ما نبوده و تنها مکان گیرندهها را تعیین کنیم. پس در ایـن سیستمها فقط موقعیت مکانی گیرندهها پارامتر مورد نظر و قابل انتخاب ما است.
چگونگی دسترسی به سیگنال
اما موضوع مهمی که مطرح میشود چگونگی دسترسی به سیگنال رادار در این سیستمهـا اسـت. بـا توجه به این که مکان فرستندهها مشخص است. در این سیستم ها علاوه بـر مسـ یر موجـود بـین فرسـتنده و هدف و گیرنده، کانال دیگری به نام کانال مرجع شکل می گیرد. این کانال با ایجاد یک مسـیر مسـتقیم بـین فرستنده و گیرنده به وجود آمده که از طریق سیگنال فرستنده در اختیار گیرنده قرار میگیـرد. از ایـن فـرض (معلوم بودن سیگنال ارسالی) در طراحی آشکارساز استفاده میشود.
نتیجه گیری
مفهوم رادارهای Mimo بعد از پیدایش این مفهوم در مخابرات و کاربردهای گسترده آن در این زمینه پیدا شد. در سال های اخیر، تعداد مقالات و پژوهش های مرتبط با این موضوع بطور چشمگیری افزایش پیدا کرده است. هرچند از لحاظ عملی هنوز ساخت و استفاده گسترده از این رادارها مشاهده نمیشود ولی این رونده افزاینده تحقیقات در این بخش نشان از این است که این سیستمها در آینده ای نزدیک مورد استفاده قرار خواهند گرفت. در سالهای بعد از ۲۰۰۰ تکنولوژی رادار دوباره بعد دیگری یافت و آن رادارهای Mimo بود.
سازوکار
در این رادارها چند آنتن فرستنده میتوانند شکل موج های کاملاً متنوعی را ارسال کنند. این نکته برخلاف رادارهای آرایه فازی بود که شکل موج های ارسالی بطور خطی به هم وابسته بودند و در واقع هر کدام گونه شیفت یافته و تقریب شدهی از یک سیگنال اصلی کوپل شده بودند. در اینجا درجه ی آزادی بسیار بالاتر بوده و شکل موج ها میتوانند کاملاً همبسته و یا عمود برهم انتخاب شوند. در واقع مهمترین سدی که در رادارهای Mimo شکسته میشود، وابسـتگی کامـل شـکل مـوجهـای آرایههای رادار به هم است.
به تبع آن مهمترین مسلهی که در این تکنولوژی پیش مـی آیـد طراحـی شـکل موج های بهینه برای هرآرایه رادار است. طراحی شکل موج ارسالی در حوزه های مختلف زمان، فرکانس،کـد و فضا قابل انجام است. طراحی شکل موج در چندین حوزه نیز بصورت همزمـان قابـل انجـام اسـت. مـثلاً بـرای طراحی شکل موج های طراحی در حوزه زمان- فرکانس صورت میگیرد.
راهکار
دو آشکار ساز بهینه برای رادارهای Mimo با آنتنهای گسترده ارایه شـد. در آشکارسـاز اول سـیگنال دریافتی تمامیگیرندهها که ناشی از سیگنال ارسالی تمامی فرستنده ها است در پردازنده مرکزی جمـع شـده و آشکارسازی متمرکز در آنجا صورت میگیرد. این نوع آشکارسازی پردازش بیشـتر و پیچیـدگی بـالاتری بـه دنبال دارد.
در نهایت به دلیل پیچیده بودن آشکارساز، احتمال آشکارسـازی بـه طـور صـریح در ایـن روش بـه دست نیامده و از انحراف معیار برای بررسی عملکرد سیستم اسـتفاده مـی شـود. در آشکارسـاز دوم هر گیرنـده سیگنال ناشی از تمامی فرستندهها را پردازش کرده و وجود و یا عدم وجود هدف را تشخیص می دهد. سـپسهای حاصل از آن در پردازنده داده مرکزی جمع شده و تصمیم گیری نهـایی صـورت مـیگیـرد. در ایـن آشکارسازی احتمال آشکارسازی بطور صریح بدست میآید.
مزیت
مزیت های که درجه آزادی بیشتر در رادارهای Mimo به همراه دارد عبارتند از:
افزایش قابل ملاحظه دقت در تشخیص پارامترهای هدف و تخمین پارامترهای آن
امکان استفاده ی مستقیم از روش های وقفی برای تشخیص هدف و تخمین پارامترهای آن
انعطاف پذیری بسیار بیشتر در طراحی پرتوی توان
افزایش تعداد بیشینه اهداف قابل ردگیری تا حد M ( که Mتعداد آنتنهای فرستنده است)
استفاده از تنوع فضایی هدف در اهدافی که RCS آن ها بطور قابل ملاحظه ای در زوایای مختلف فرق میکند.
معیارهای طراحی
برخوردار بودن یک سیستم راداری از مزیت های فوق وابسته به طراحی مناسب شکل موجهای ارسالی از هر آنتن آن است. معیارهای مختلفی که برای طراحی شکل موج ارسالی در نظر گرفته میشوند عموماً عبارتند از: شکل دهی پرتو توان، بهینه کردن تابع ابهام، کمینه کردن خطای تخمین، بیشینه کردن SINR و….


 2")
 6")
 7")
 8")
 8")
 9")
 10")
 11")
 12")
 13")
 14")
 4")
 15")
 16")
 17")
 18")
 19")
 20")

 را بشناسید 5")






متن بسیار عالی و روان بود. فقط کاش منابع پیوست می شد.
با سپاس از شما